所有的眼睛都睁大了,或者四处环视,整个嘉手纳都在关注着这架"黑色的喷气机"。起飞前几分钟,后备机组驾驶着"机动管制"车开到跑道上,他们将沿着跑道检查上面的"外来物体",以免这些杂物在起飞时伤及飞机或者轮胎。地勤人员接下来用大锤打掉起落架边的轮挡,并把它们拖进地面支援的"面包车"里,然后一声清脆的礼炮把976号机送走。在最后松开刹车的一刻,嘉手纳塔台呼入"50,你可以起飞了。"佩恩回答道"嗒-嗒",而奥马利把油门向前推,让发动机转速增加至7200转/分钟,松开刹车并对他的侦察系统官说"军用推力----设定,三基、喷油温度、尾喷管位置和油压----所有的都检查了,我们上路了,爱德。"
飞行员接下来把油门向前推至中间加力的位置,每一台发动机打开的时候都让飞机向各自的方向摆动,伴随有闪亮的火舌从每台发动机的后方喷出。"推力至最大A/B",奥马利在这架"波布蛇"加速起飞时说道,10秒钟之后是"决策速度----看起来不错,没有问题。"随着976号机达到180节的速度,奥马利平缓地向后拉起操纵杆,上机鼻与海平面呈10°夹角。235节速度时,他喃喃地说"离陆"并且"收起落架",抵达300节的速度极限前,他迅速收回起落架。在不到25秒钟的时间里,凯利.约翰逊的杰作就开始了它的首次作战任务。
976号机的垂尾图案 via http://www.habu.org/

升空后,奥马利安慰佩恩说所有的系统看起来都很好,而且发动机的仪表也检查过了。很快,嘉手纳的塔台就呼入"海狸50,与嘉手纳的雷达建立联系。"佩恩在麦克风上点击了两下做出回应,然后选择了雷达的频率。"海狸50,这里是嘉手纳雷达,应答2107。"他在敌我识别板上输入了密码并且按下了"识别"按钮,于是,嘉手纳的管制员确定飞机可以继续进行跟踪,他接下来选择了一个高频无线电频道用于和加油机汇合。
在0.5马赫速度时,奥马利打开控制面限制器,并且看见远光面板上的"表面限制"灯熄灭。他和佩恩两人之间的相互检查,确认两人的飞行指示平台都运作良好,这个指示平台带动着他们的飞行仪器。奥马利选择了天文-惯性平台陀螺用于仪器电源和参考,而佩恩使用次要的陀螺平台当作备用。
自动油箱测序也检查过了,而且高度表在18000英尺以上被设定至29.92,以保证所有的飞机都拥有各自的标准高度参考。在他们前往加油区的路上,奥马利于FL250高度放平976号机并且保持着0.90马赫的速度,向空中加油管制点飞去,那里有一架KC-135加油机在盘旋中。同时,佩恩启动了他的任务传感器。
为了第一次作战飞行,这架SR-71在机鼻上安装了一台固特异航空侧视雷达(SLAR)、并在机身中部的前起落架前方安装了一台垂直下视地形任务相机,还在飞机右侧N舱里安装了一台AR1700雷达记录装置。座舱后面的P舱和Q舱里安装有左右"近距离观察"的宏康HR-308B战术任务"TEOC"相机,上面配有一个48英寸(1219毫米)焦距的镜头。最后,S舱和T舱装有2台伊泰克公司的HR-9085作战任务相机(OOC),这些高分辨率,三维全景相机配有13英寸(330毫米)焦距的镜头。
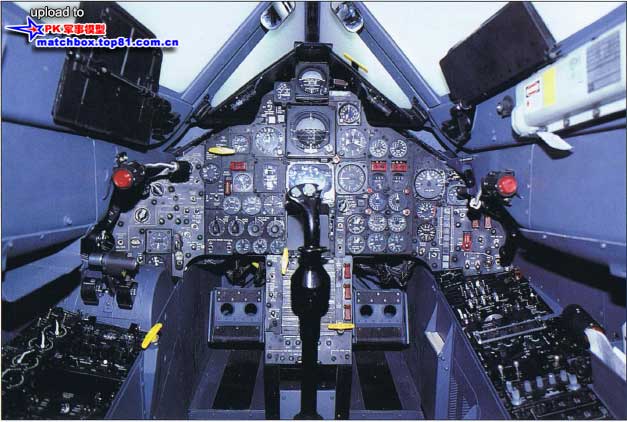
SR-71的座舱尽显60年代的经典布局,并没有安装什么现代的器材设备。A-12的座舱更加复杂,因为很多传感器和导航系统都被移到了后座的侦察系统官座舱里。
到了任务的这个阶段,佩恩正在等待侦察系统和传感器热机,这样他才能够判定它们在飞行中的表现。雷达的预热要花上6分钟的时间,启动记录关联显示器要花上2分钟时间,2分钟预热电磁记录仪(EMR),在相机测试前还要准备20秒。过了6分钟,他按下雷达的内置测试按钮,但是它没有工作。因为这不是任务里的主要传感设备,机组们决定将任务继续下去----他们将依靠天文导航系统和陀螺平台来导航,佩恩接来下检查了电子对抗系统的干扰设备。
第一台A电子干扰机启动了,经过了2分钟的预热后,待机灯亮起来了。接下来是其它的防御系统,干扰机B、C、E以及最后的G,启动后被证明是可以工作的。在这个时候,佩恩告诉奥马利说防御系统已经准备好----在去-不去的检查清单里明显是"去"的意思。
一个型号为ARC-50的特殊隐蔽的无线电测距仪专门被研发出来,使得SR-71能够直接在机组们于无线电静默飞行时通过测距仪给予的高度和距离信息与KC-135Q直接汇合。在冲绳西南处对接后,这架加油机开始将特制的JP7航空燃油注入SR-71的油箱,飞机安全地插上加油管,接受了70000磅的油料之后,佩恩重新计算了飞机的重心(CG),空中加油的最后一部分于附近的热带气团上进行,结果导致SR-71在两台发动机以军用推力在350节速度巡航时操纵杆响应迟缓。
为了克服空气阻力并且限制军用推力,奥马利打开了一台发动机的"最小加力",然后交叉控制,稍微抵消了另一侧的推力----增加推力使得加注10000磅的油料非常轻松。在一个预定的时间和位置上,"海狸50"加满了JP7燃油,加油管断开了连接。这架SR-71向后滑去,缓慢地离开加油机后,飞行员打开加力并且把推力开到最大,爬升至FL330高度前把976号机加速至0.90马赫。
在33000英尺高度处,奥马利缓慢地把机鼻压到地平线以下,以2500英尺/分钟的速度下降来突破音障。这架飞机几乎超越了1马赫,而速度继续指在435节的相对空速(KEAS)位置上,此刻,飞行员向后拉操纵杆,在30000英尺高度处,下降变成了爬升,而三基计数器指出相对空速为450节,这是绝大多数爬升时的标准速度。完成了这次被称之为"迪西-涂鸦"的机动后,奥马利重新启动自动驾驶,保持450节相对速度并继续爬升。
达到1.25马赫的速度时,喷油温度和压缩机入口温度(CIT)都被记录下来。到了1.7马赫,进气道参数和重心的偏移都得到了监视,接来下是手动设置后部分流舱门控制并锁住进气道导叶片(IGV)开关,最后电子对抗设备的干扰系统也再次重新检查过了。
飞行在东南亚上空的976号机 via http://www.wvi.com/

在60000英尺高度处,佩恩关掉敌我识别高度读数,来保证SR-71升限能力的保密性。此外,飞机的红色闪烁防碰撞航标也被关掉,并且收起来,避免摩擦的热量对其造成损伤,同样也降低高空飞行的目视信号。当后部分流舱门控制被设置在B位置时,飞机速度达到了2.6马赫,奥马利开始减少相对空速,结果就是每向前增加10%的马赫级别时,相对空速就会降低10节。
高空飞行的路线让他们前往台湾的东边,于菲律宾以北进入南中国海上方,从中国的东海岸划过,并穿过海南岛后,天文导航系统的自动导航装置缓慢地将976号机平缓地右压35°坡度,朝北飞,这架飞机进入了东京湾。继续向北前行,佩恩凝视着他的取景器并且在海南岛的西侧发现了一个大码头(三亚?),这就是他之前策划时用作验证航行位置的目视参照物。让他非常满意的是,这就是他想看到的那个码头,天文导航系统在它中部50英尺范围内的"黑线"上飞行,此时他们的高度为75000英尺,速度3.0马赫。
他们进入东京湾后,奥马利开始巡航爬升至78000英尺,并且加速至3.17马赫,准备从"前门"进入北越。通过他的取景器,佩恩可以看见下方海面上的船只,而且他们同样还听见了下方美军战机飞行员在海防和河内上空进出时激动的声音。使用跟踪相机对地面路线进行任务后的核实,而且电子情报和联络情报(COMINT)传感记录器也已经在运行中,穿越海岸线之前,佩恩把任务作战相机的摄影距离设定为10英里。
转向284°航向后,他们于78000英寸高度穿越海防,且以2秒/英里的速度飞行,任何人都无法拦截他们。所有北越人能做的就是在雷达上看着他们。976号机上的电子对抗系统指出,当他们穿越海岸线的那一刻就被SA-2地空导弹阵地的"扇歌"火控雷达锁定了。佩恩关掉正确电子对抗信号回应,雷达失去了锁定。当他们从海防港上飞过之际,下方的天气对于照相侦察来说再好不过,福金(Phu Kin)机场、Busundi机场和河内周围大量的目标都暴露在他们的下方,曝光记录器被按下,告诉佩恩传感器按照预想中的一样在工作----这将会是一次完美的拍摄。
1968年的嘉手纳基地又开始了另一次"波布蛇"的任务。